在过去几年里,一系列新的终端市场和应用开始涌现,推动了对更高性能位置传感器的需求。这在磁性位置传感器 IC 领域尤为明显,此类传感器的供应商已经响应市场的急切呼唤,开始推出新产品,专为快速发展的机器人和无人机市场量身定制……
在过去几年里,一系列新的终端市场和应用开始涌现,推动了对更高性能位置传感器的需求。这在磁性位置传感器 IC 领域尤为明显,此类传感器的供应商已经响应市场的急切呼唤,开始推出新产品,专为快速发展的机器人和无人机市场量身定制。新型磁性位置传感器更加智能,可提供更高的分辨率和精度,更小更轻,而且功耗远远低于其前代产品。本文将简述一下磁性位置传感器的历史,以及它们以往所服务的终端市场和服务方式,然后深入探讨当今新一代器件中引入的特殊的新功能和性能。最后,聚焦机器人和无人机领域,分享这些新式的创新型磁性位置传感器的几个用例。
霍尔磁性位置传感器已经问世很长一段时间了,但随着汽车、消费和工业应用终端市场的不断电气化,它们如今在这些应用中的使用仍然在增加。例如,在汽车领域,磁性位置传感器目前用于诸如转向、制动、变速器、换档器、底盘高度、踏板、油量感测等车辆子系统。而自动驾驶车辆的激增只会促进其用量需求。在消费领域,它们广泛用于白色家电的门位置检测。在工业市场领域,它们用于为控制系统和工业机器人提供执行器、杠杆和操纵杆位置反馈。此外,在所有市场中,它们都大量用于辅助电机控制。
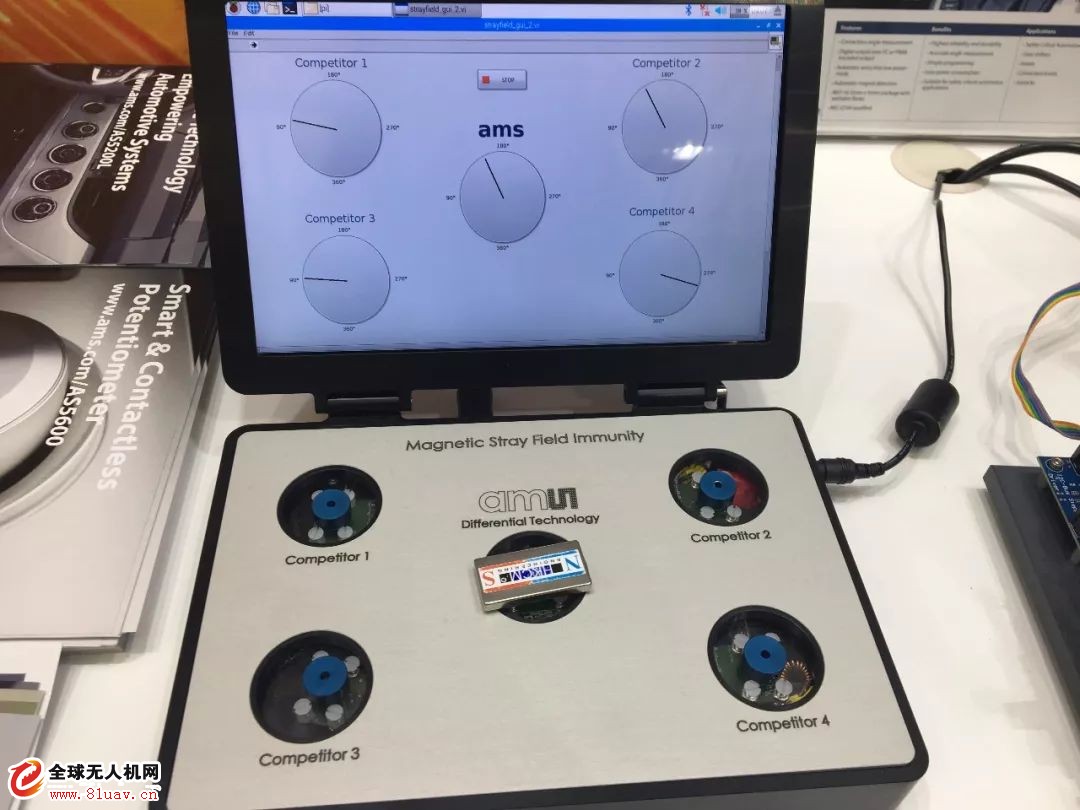
磁性位置传感器得到如此广泛的使用的主要原因是它们可以由低成本的 CMOS 半导体技术实现,并且可以在最恶劣的环境中提供准确、可重复、可靠的位置测量。磁性位置传感器不受灰尘、泥土、污垢和液体的影响,并且可以在高温、高湿的环境下工作。一些供应商,例如艾迈斯半导体,甚至提供免受杂散场影响的磁性位置传感器。
CMOS 磁性位置传感器已经整合进各种常见的表面贴装和单列直插通孔式 IC 封装中,对于上述提到的大多数应用而言,此类封装已经足够小了。同样,CMOS 磁性位置传感器的典型功耗耗为几十毫安。这仍然是传统汽车、工业和消费类市场可承受的功耗水平。
然而,随着汽车的快速电气化,连接到物联网的新型消费产品层出不穷,工业设备和工厂通过使用机器人和人工智能变得越来越高效和智能化,过去的磁性位置传感器不再适合。现在的设计人员普遍认为,它们的物理尺寸和功耗都过大,而且精度不足以满足系统的性能目标。
当前正致力于为轻工业、医疗和太空探索等终端市场研制新型机器人的设计工程师,对传统的磁性位置传感器也持相同的看法。在这三个终端市场中,机器人设计师都需要超小型且超低功耗的磁性位置传感器,以生产非常小巧的高精度机器人手臂。机器人手臂将用来完成复杂精细的任务,例如组装电子元器件、执行各种腹腔镜手术以及在遥远的行星上拾取小矿石和沉积物样品等。
迅速发展的无人机市场也是如此,尺寸、重量和低功耗是实现更长时间飞行任务的关键需求,在无人机的摄像头云台领域,超小型和超低功耗的磁性位置传感器尤其必不可少。磁性位置传感器用于无人机的摄像头云台,为云台的无刷直流电机提供换向反馈,并提供三维的齿轮角度位置反馈。如果没有这些磁性位置传感器,摄像头的稳定性不足以提供令人惊叹的摄影效果。
幸运的是,磁性位置传感器供应商正响应客户和这些新型终端市场的需求,推出了新一代磁性位置传感器。新型磁性位置传感器采用超小型封装,包括晶圆级芯片封装 (WLCSP),该封装几乎与传感器裸片本身的尺寸相同,这些位置传感器能够自动进入低功耗模式,以便降低整体功耗。
例如,艾迈斯半导体提供了两款能满足这些新需求的器件。AS5510 线性位置传感器采用 WLCSP 封装,尺寸仅为 1.46mmx1.0mmx0.6mm,具有低功耗模式,在此模式下仅消耗 25μA 电流。同样,12 位精度的 AS5055A 采用小型 QFN-16 封装 (4.9mmx6.0mmx1.75mm),具有低功耗模式,在此模式下仅消耗 3μA 电流。这些特性使 AS5055A 被广泛用于需要超小体积和超低功耗的电机控制系统。该产品目前广泛用于各种终端市场应用的电机控制领域,包括工业和消费应用以及星际空间探测机器人。艾迈斯半导体还提供多种磁性位置传感器的系统级封装 (SiP) 解决方案,在这些方案中,传感器和相关的去耦电容集成在同一封装中,实现“无 PCB”设计,以获得更低系统成本和更小外形尺寸的解决方案。
艾迈斯半导体最近也开始提供最新的磁性角度位置传感器 AS5600L样品。该产品提供 12 位输出分辨率,在 -40 至 125oC 的整个工作温度范围内的最大 INL(积分非线性)误差仅为±1o,采用 WLCSP (2.07mm x 2.63mmx0.6mm) 封装,在自动低功耗模式下仅消耗 1.5mA 电流。以下是 AS5600L 的 INL 误差的两个示例仿真图,空隙 (Z) 为 1.5mm,目标磁铁和传感器自身之间的 X/Y 偏差不超过 ±1mm。在图中可以看到,X/Y 零偏差时,两个目标磁铁均可实现 INL 误差 < ±0.5o。当空隙 < 1.5mm 时,INL 误差甚至可以更小。
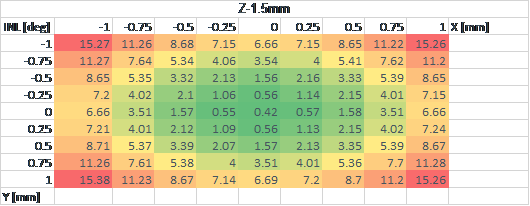
磁铁(直径 4mm、厚 2mm)
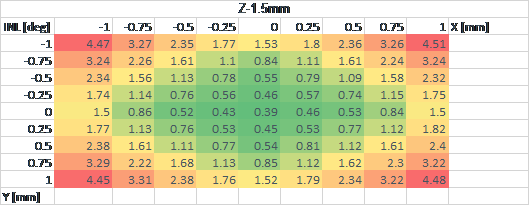
磁铁(直径 6mm、厚 2.5mm)
图 1.0
这种低 INL 误差或高精度结果,以及在宽温度范围和目标磁通量下的低噪声和超低功耗,使基于霍尔效应的超小型磁性位置传感器(如 AS5600L)能够满足当今机器人和无人机设计工程师对性能和空间的需求。此外,它们还比竞争性位置传感器技术具有成本优势。
机器人设计师正在利用新一代磁性位置传感器,为各种终端市场(包括医疗、轻工业以及地质与太空探索)研发四肢更加小巧灵活的机器人。肢体小巧的机器人可以在应用中更快、更精准地拾取和移动物体,例如:执行轻工业电子组装任务、实现机器人腹腔镜手术,甚至在遥远的行星上拾取小份土壤样本。具体而言,他们正在使用磁性位置传感器来提供关节电机换向和齿轮位置反馈。
为了实现这些小巧的机器人手臂,机电一体化设计工程师正在利用柔性印刷电路板将这些小型磁性传感器 IC 安装到机器人主体的主控制器上,以便向其提供电源和将数据信号传送回机器人主体中的主控制器。参见下图 2.0。
图 2.0
与此类似,新一代磁性位置传感器也用于无人机领域。无人机设计人员正在开发新型三轴摄像头云台,其中采用了许多与智能手机相同的技术,以保持摄像头的稳定性,从而确保出色的拍摄效果。然而,正是超小型和低功率磁性位置传感器的使用发挥着关键作用,提供了摄像头云台的无刷直流电机和齿轮的三轴位置反馈,以确保飞行和拍摄时相机始终保持水平、无振动。参见图 3.0。


图 3.0
总而言之,新一代高精度、小尺寸和低功耗磁性位置传感器 IC使当今的电气和机械设计工程师能够研发出新型的、功能强大的机器人和无人机,从而为许多新市场和应用提供服务。在不久的将来,我们预期会看到小型医疗机器人手臂真正地穿入人体内部,娴熟地操作,以切除肿瘤和执行其他手术。在工业机器人市场上,我们预期会看到轻型智能制造机器人用于执行更复杂精细的任务,如电子装配。而在无人机领域,我们会继续看到摄像头和负载云台的发展和改良,以支持更高分辨率的摄影,完成更高精度的 2D 和 3D 测绘。
作者简介
是艾迈斯半导体位置传感器业务线的高级产品营销经理。Donovan 先生在磁性传感、电信和雷达信号处理方面拥有 30 多年的行业经验,他在磁性位置传感、雷达信号处理和电信通信领域拥有 8 项专利。Donovan 先生毕业于马萨诸塞大学洛厄尔分校,拥有电气工程理学学士学位,同时他还拥有南新罕布什尔大学的工商管理硕士学位。